Imitation Learning: behavioral cloning
| Created | |
|---|---|
| Created by | Lei Xiang |
| AI summary | No content |
| Last edited time |
https://zhuanlan.zhihu.com/p/68818193
行为克隆问题定义
给定一组由专家策略 (策略未知)生成的示范数据(训练数据集),其中
- 每条轨迹
- 表示状态, 表示动作, 表示轨迹长度
模仿学习的目标是学习一个策略 ,使其尽可能接近专家策略 。
基本流程:先获取专家数据(训练用),然后以 作为输入,产生的动作 作为输出(标签),通过监督学习的方法进行训练
目标: ,其中 表示训练(专家)数据分布, 为专家动作,故该式表示在 时刻选择正确动作的对数概率的期望
行为克隆数学推导
考虑已有的数据集 ,如何恢复专家策略 呢?
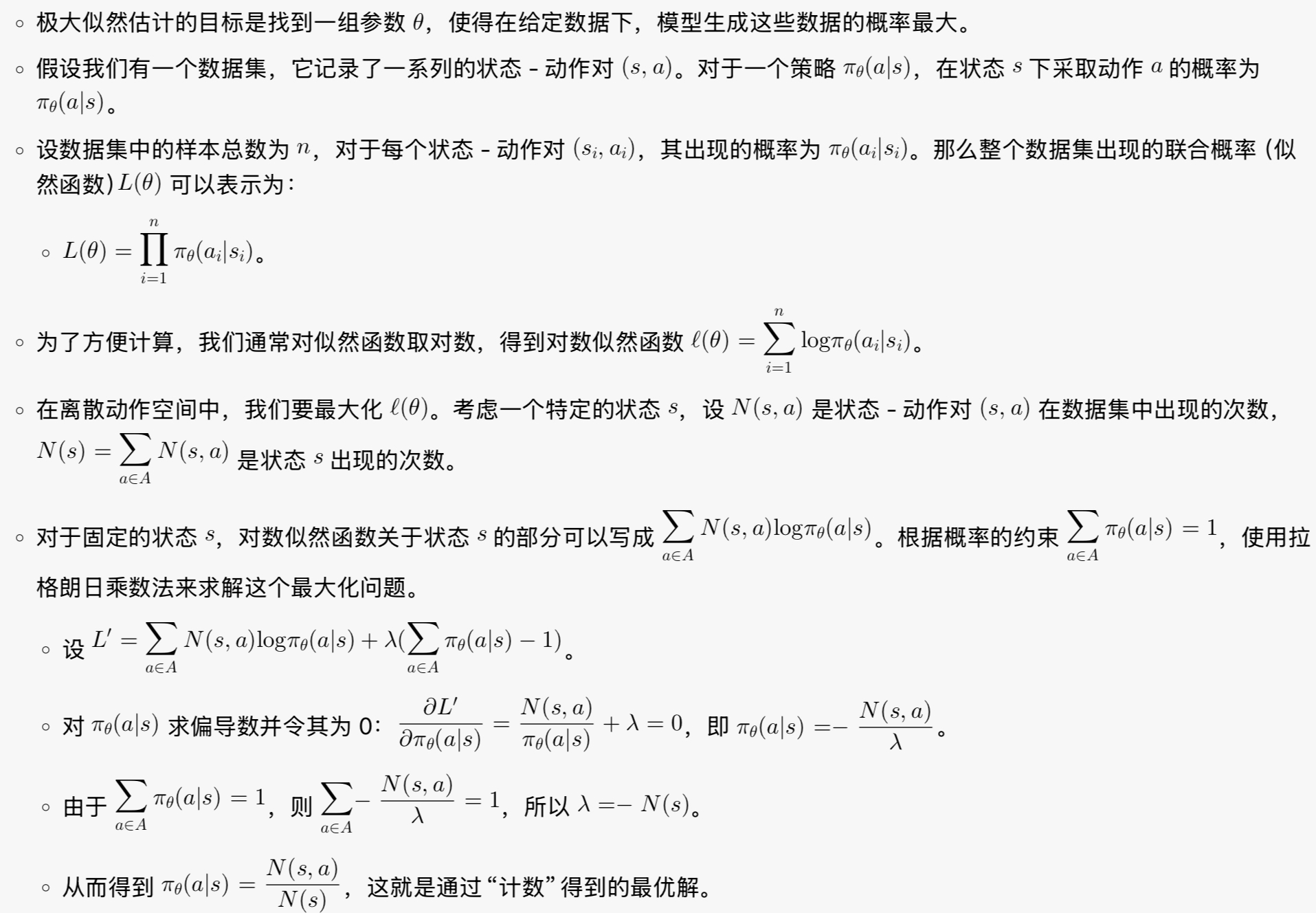
行为克隆的想法很简单,我们直接从数据中估计 。 一个经典的估计方法就是极大似然估计:对于数据集中每一个状态-动作对 ,希望最大化策略 在状态 下选择动作 (专家) 的概率:
从轨迹的角度考虑,一条完整轨迹的概率可以表示为:
取对数后:
在行为克隆中,我们关心的是策略 ,而初始状态分布 和状态转移概率 与策略参数 无关。因此,最大化对数似然等价于最大化与 相关的项:
这与先前从状态-动作对角度得到的优化目标是一致的
对于离散动作空间,公式 (2) 的最优解可以通过“计数”来求解,,其中 是状态-动作对 在数据集中出现的次数, 是状态 出现的次数;对于数据集里没有出现过的状态 ,可以令其动作分布为一个均匀分布,即 ,其中 为动作空间的大小
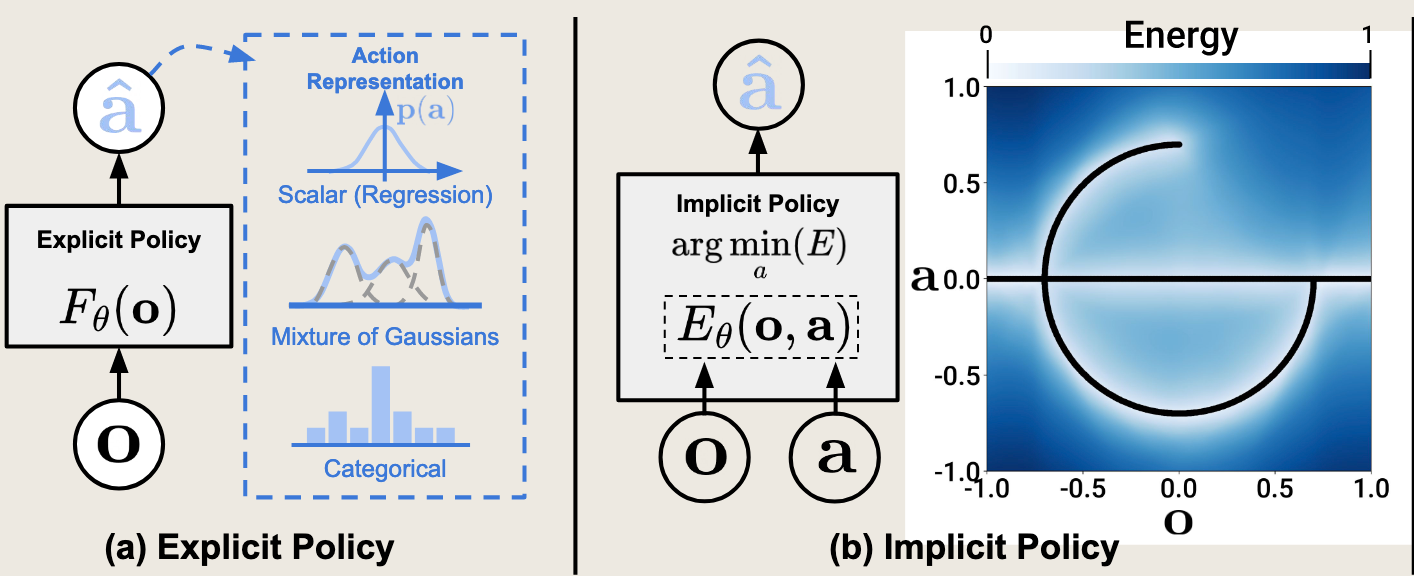
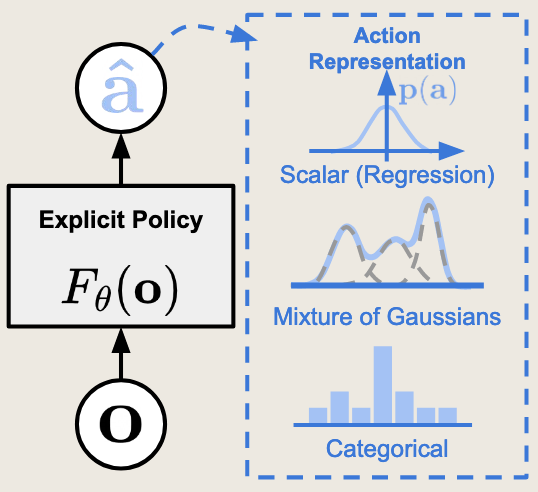
对于连续动作空间,可以使用高斯分布来表示策略。具体地,对于每个状态 ,我们将策略 表示为高斯分布 【参数化方法】
在参数化表示法中,高斯分布和神经网络扮演不同的角色:
- 高斯分布是策略的输出形式:对于连续动作空间,我们通常用概率分布来表示策略 ,而高斯分布是一种常用的概率分布选择。它需要均值 和方差 两个参数来定义。
- 神经网络是函数逼近器:它用来生成高斯分布的参数。具体来说,神经网络接收状态s作为输入,输出高斯分布的参数 和
神经网络负责从状态映射到分布参数,高斯分布负责基于这些参数给出动作的概率密度
对于多峰问题,可以使用混合高斯分布来求解,即多个高斯分布叠加
行为克隆的分布偏移问题
训练阶段基于专家演示数据学习,对应状态分布 ,测试阶段智能体面对的状态分布为 ,两者不同产生分布偏移。下面分析:在给定策略犯错概率界限 的假设下,分析学习到的策略 对应的状态分布与训练集状态分布的差异
在深入探讨行为克隆的分布偏移问题前,先引入 KL 散度(Kullback-Leibler divergence)的概念,它在衡量两个概率分布的差异方面具有重要作用。KL 散度,也称为相对熵,用于描述两个概率分布 P 和 Q 之间的差异程度,其公式定义为:
对于离散概率分布,x 取遍所有可能的取值;对于连续概率分布,则通过积分形式表示 。KL散度具有非负性,即
,并且当且仅当 P = Q 时,。直观来说,KL 散度值越大,表明两个分布的差异越大;值越小,则说明两个分布越相似。
在行为克隆中,我们常利用 KL 散度衡量学习到的策略分布与专家策略分布之间的差异,进而分析算法性能和策略优化方向。
原始形式推导
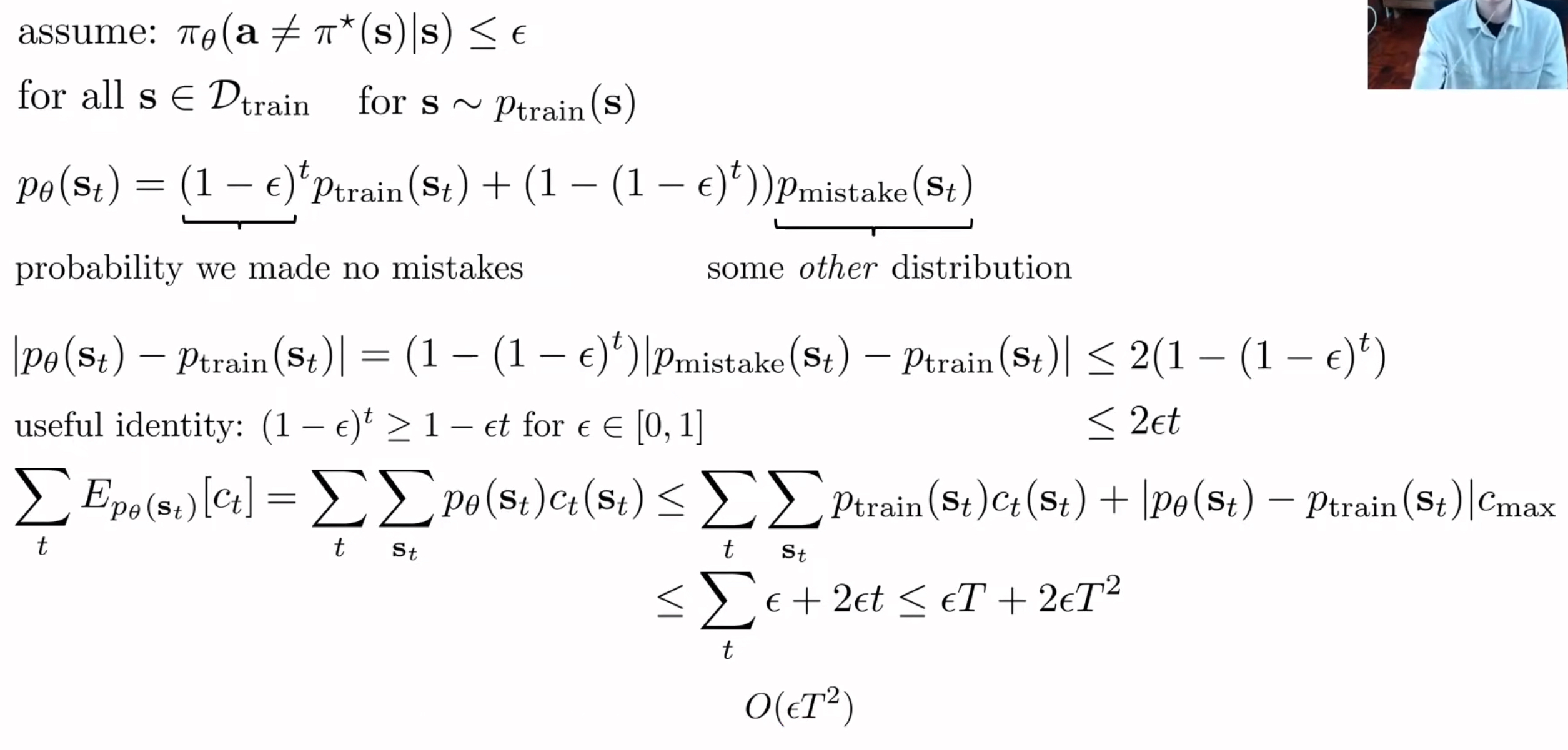
- 假设条件:假设在训练集 中,对于服从 分布的状态 ,学习到的策略 采取非最优动作(与专家策略 不同的动作的概率不超过 ,即
- 状态分布公式推导:定义 ,其中, 代表到时间步 都不犯错的概率, 是训练集中状态 的分布,所以 表示到时间步 都不犯错时状态 的分布贡献; 是到时间步 至少犯一次错的概率, 是犯错情况下状态 的某种分布, 是犯错时状态 的分布贡献
- 状态分布差异分析:计算可得 ,利用恒等式 (当 时),进一步推出 ,这表明随着时间步 的增加,以及犯错概率界限 的影响,学习到的策略对应的状态分布 与训练集状态分布 的差异有一个逐渐增大的上界
期望形式推导
- 假设设定:假设学习到的策略 与专家策略 存在差异,在训练分布 下,策略 \pi_{\theta} 采取非专家动作(即与 不同的动作)的期望概率存在上界 ,即 ,该式表明,平均来看,在训练阶段常见的状态下,策略 偏离专家策略的程度是有限的, 刻画了这种偏离程度的上限
- 推导过程:设 和 分别为测试阶段和训练阶段在时间步 的状态分布。通过概率论相关知识及推导,可以得到 ,直观理解,由于策略 与专家策略的差异导致了状态分布的变化,而在上述假设下,训练与测试状态分布差异的期望被限制在 以内 。这意味着,平均而言,测试阶段的状态分布与训练阶段状态分布不会相差太远,但随着时间推移或任务复杂性增加,这种差异仍可能对智能体性能产生影响
行为克隆的误差累积问题
(一)误差产生原因
- 策略偏差:专家数据有限,无法覆盖所有情况;学习算法本身局限,不能完美拟合专家策略。
- 分布偏移:训练和测试状态分布不同,导致智能体按训练策略行动产生误差并累积。
(二)误差影响
- 性能退化:在连续任务中,误差累积使智能体表现逐渐变差。
- 增加任务失败风险:可能使智能体进入错误且难以恢复的状态。
(三)缓解方法
- 数据增强:对训练数据进行变换,扩充数据多样性。
- 在线学习与更新:智能体在运行中持续学习新数据更新策略。
- 多专家学习:融合多个专家策略,弥补单一专家局限性。
Goal-conditional 行为克隆
Goal-conditional Behavior Cloning 是模仿学习的一种扩展形式,它不仅学习如何模仿专家的动作,还考虑了目标条件:在标准行为克隆中,策略学习映射 ,而在目标条件行为克隆中,策略学习映射 ,其中 表示目标
当目标是达到最终状态 时,训练目标函数可以表示为:
我们希望最大化在当前状态 下,给定目标 (即最终状态)时,执行动作 的对数概率
算法步骤:
- 数据收集:收集包含状态、动作和目标三元组 的专家示范数据集
- 模型设计:构建模型 ,该模型接收状态 和目标 作为输入,输出动作分布参数
- 目标函数:通常使用最大似然估计作为训练目标
- 优化过程:使用随机梯度上升或其变体来优化参数
- 验证评估:在测试环境中使用不同目标来评估学习策略的性能
https://arxiv.org/abs/1906.05838
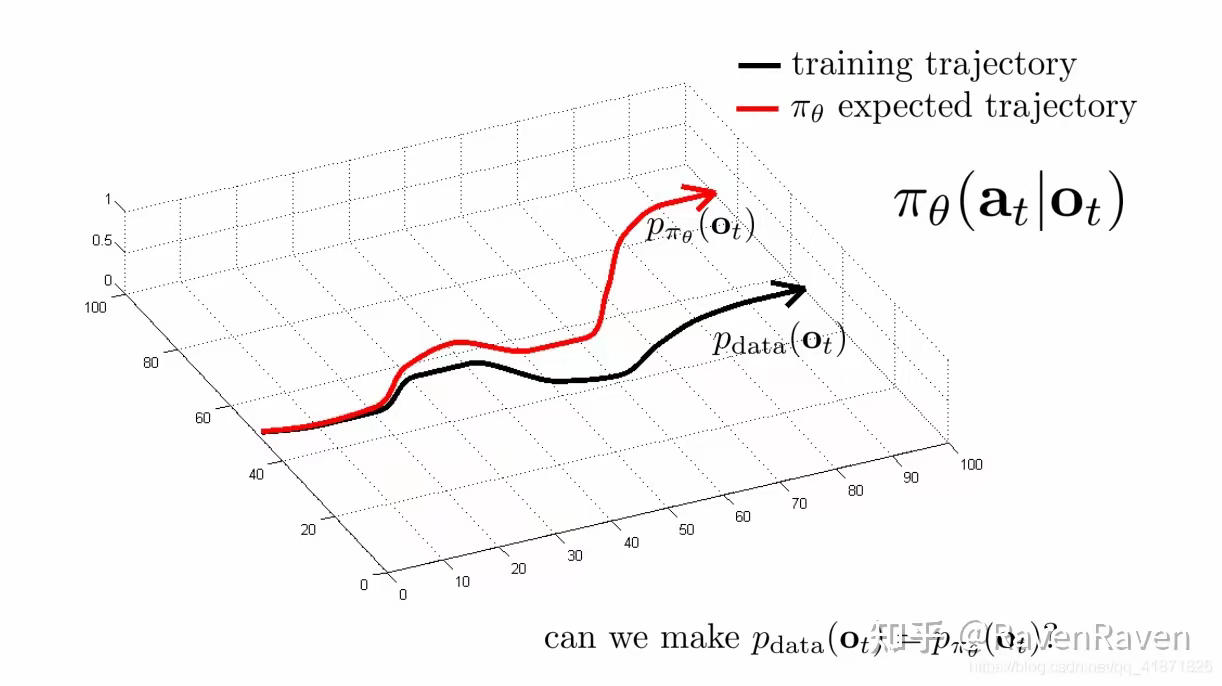
直接模仿有效果吗?
没有!为什么呢?模仿学习是一个 image classification 问题,我们都知道 classification network 训练后是有误差的;另外,模仿学习还是一个 sequence decision 问题,也就是当前时刻的决策会影响下一时刻的决策。我们用上图来解决为什么直接模仿没有效果。黑色轨迹指训练样本的 state 与时间的关系,红色是指用训练后的 policy 对训练样本进行测试后得到的轨迹。按理说,我们期望两者能重叠,但是,由于任何训练都是有误差的,这个误差一开始很小,导致 agent 看到了训练集没有的样本,虽然 deep network 有一定泛化能力,我们的 agent 还是走偏了一点。随着不断积累,agent 看到了越来越多的陌生样本,导致它完全偏离黑色轨迹。这就是模仿学习的“偏移”问题。这个问题根源是:sequence decision 问题的因果关联和样本分布不够广泛
核心的思路是收集更多有用的数据,从而提高模仿学习的效果
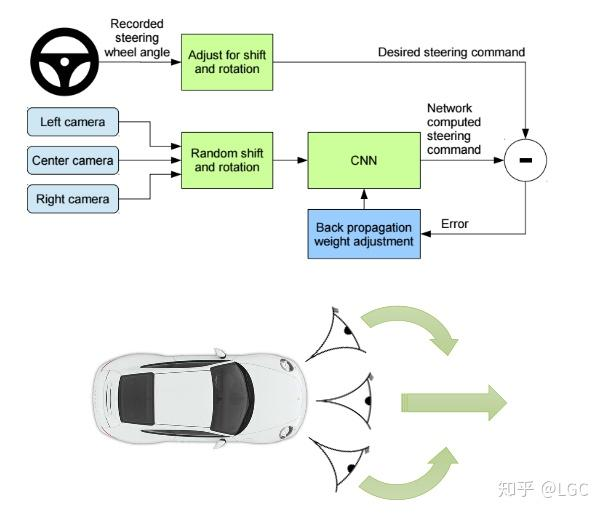
数据多样化
如果只用中间相机采集数据进行训练,训练后的网络容易让汽车“偏移”车道。为了解决这个问题,作者增加了左、右两个相机,采集汽车左右两侧的图像,左图像对应的指令是右转,右图像是左转
DAgger: Dataset Aggregation
之前的方法都是改变/优化策略,通过减少错误来使 接近
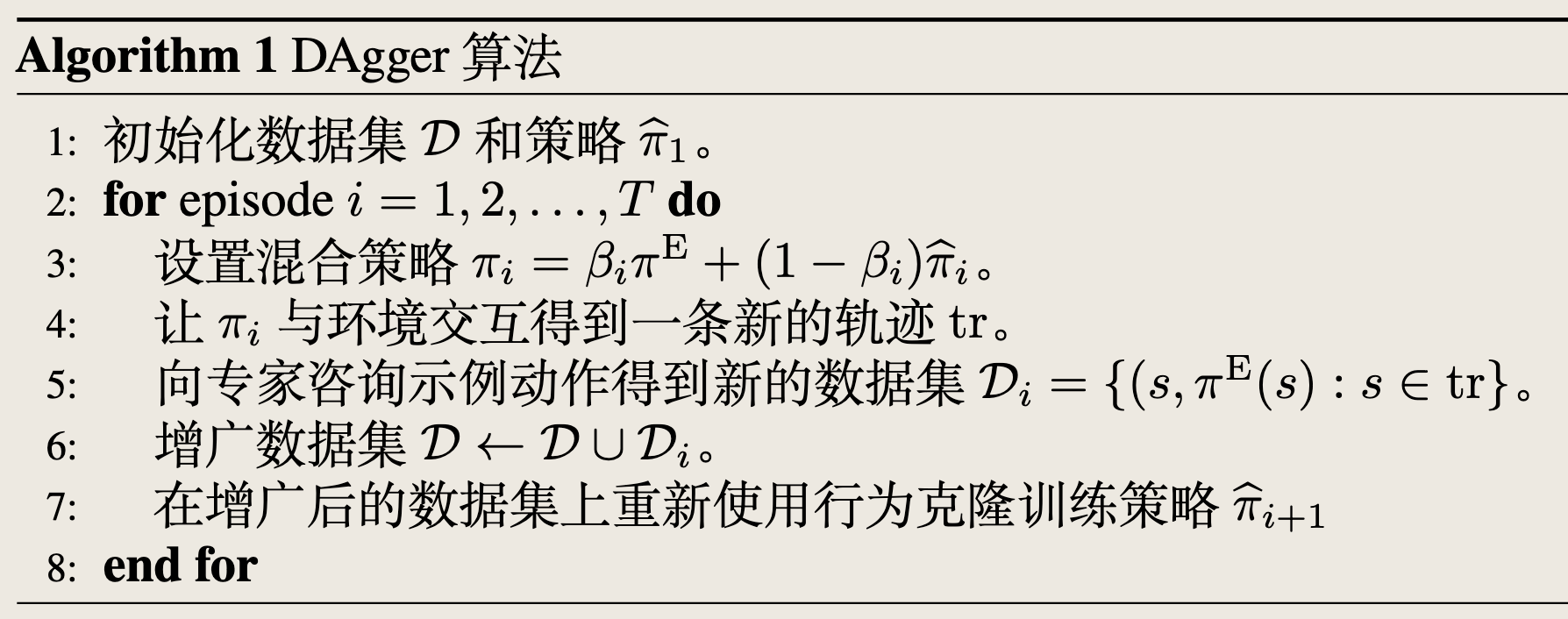
为了解决复合误差问题,Stéphane Ross 等人又提出了 DAgger(Dataset Aggregation)算法。这是一个基 于在线学习的算法,其把行为克隆得到的策略与环境不断的交互,来产生新的数据。在 这些新产生的数据上,DAgger 会向专家策略申请示例;然后在增广后的数据集上,DAgger 会重新使用行为克隆 进行训练,然后再与环境交互;这个过程会不断重复进行。由于数据增广和环境交互,DAgger 算法会大大减小未访问的状态的个数,从而减小误差
为什么有时候不能很好地拟合专家数据
非马尔科夫行为 Non-Markovian behavior
马尔科夫属性是指当前事件的发生与过去事件无关。在模仿学习中,我们通常使用:
但在实际中,我们很可能需要利用过去的观测值来预测接下来的行为:
利用历史数据可能会让模仿学习模型的性能更差,因为它会加剧"causal confusion"(因果混淆)
https://proceedings.neurips.cc/paper/2019/hash/947018640bf36a2bb609d3557a285329-Abstract.html
多模态行为 Multimodal behavior
多模态行为指在相同状态下可能存在多种合理但不同的行动方式。例如,绕过一棵树可以向左走也可以向右走,但向前走会撞树。
对于离散动作,这不存在问题。但对于连续动作,如果从单一高斯分布采样,很可能产生中间的无效动作(如撞树)。
解决方法:
- 高斯混合模型:让网络输出 N 个高斯模型组成混合模型,从中采样获得最优动作
- 隐变量模型:通过引入隐变量捕获行为多样性
- 自回归离散化:首先把动作的第 1 维离散为多个动作,采样得到第 1 个最优动作;然后将第 1 个动作和图像作为第 2 个网络的输入,输出第 2 个最优动作;以此类推