深度强化学习 Intro
PPO 里面的 GAE 是怎么算的?代表了什么?
目前,在可靠性(stability)和采样效率(sample efficiency)这两个关键因素上,PPO 和 SAC 是表现最优的策略学习算法
术语速查
概述
https://rail.eecs.berkeley.edu/deeprlcourse/deeprlcourse/static/slides/lec-1.pdf
Deep RL = Classical RL + Advanced optimization algorithm
- 深度,提供从大型数据集中进行可扩展学习的能力
- 强化,提供优化,即采取行动的能力
强化学习 v.s. 监督学习
| 特征 | 监督学习 | 强化学习 |
|---|---|---|
| 数据特性 | i.i.d(独立同分布) | 非i.i.d(基于历史经验) |
| 标注信息 | 每个样本都有确切标签 | 只有成功/失败的反馈,ground truth is unknown |
| 学习过程 | 静态数据集学习 | 动态交互学习 |
| 反馈及时性 | 即时反馈 | 延迟反馈 |
| 数据分布 | 固定分布 | 随策略变化而变化 |
RL 不只是能做游戏,机器人,还可以用来控制交通流量(MIT 教授),大语言模型,图像生成模型
核心思想:通过不断与环境交互,从经验中学习做出最优决策
方向:Learing-based control, which is a big open problem
奖励从哪里来?游戏(得分 easy);倒水(?difficult)
人类学习的特殊性
- 能够在稀疏奖励环境中有效学习
- 例子:攻读博士学位
- 最终奖励可能只有一次
- 需要长期规划和持续投入,中间过程缺乏明确的奖励信号
如何去构建一个智能机器?
Leaning 是智能的基石,人理解世界的本质其实就是学习的过程
挑战
- 缺少同时使用数据(深度)和优化(强化)的方法;
- 人学得很快,而 deep RL 方法学得慢;
- 人擅长复用知识,而 deep RL 很难在不同任务之间迁移;
- 不清楚奖励函数应该是什么;
- 不清楚预测的作用
MDPs 马尔可夫决策过程
马尔可夫链:
- state space
- transition operator,
马尔可夫过程:
- state space
- action space
- transition operator,
- reward function
部分可观察的马尔可夫过程:
强化学习定义
通过从与环境交互过程中进行学习
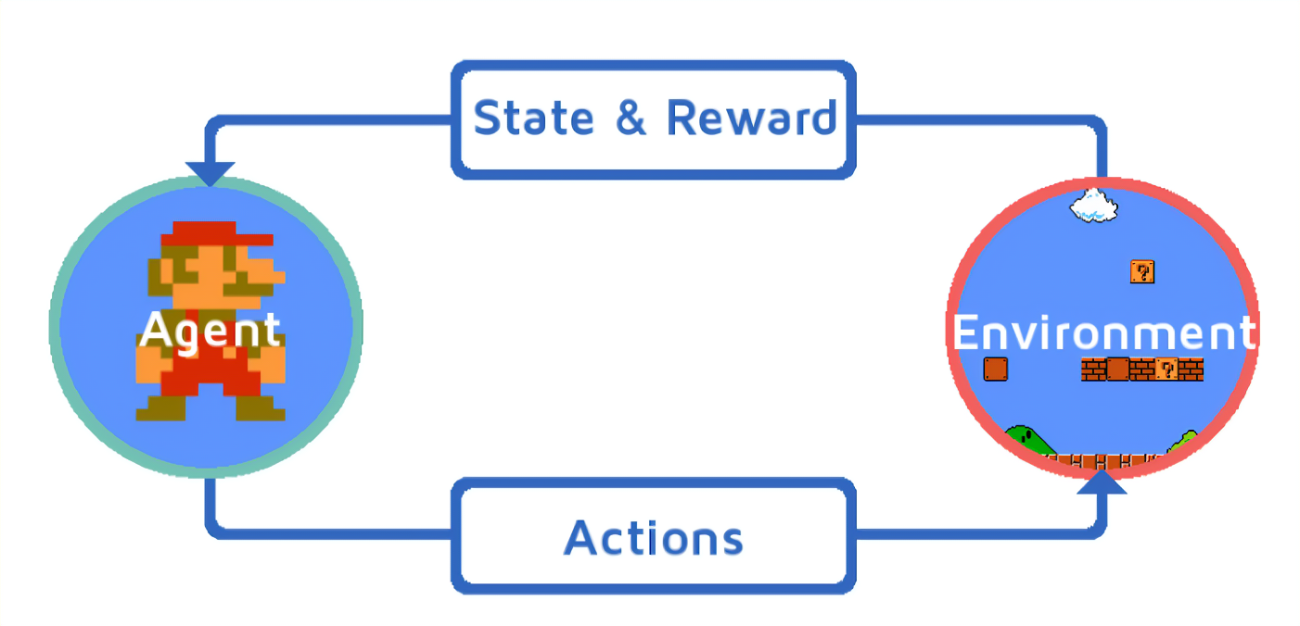
each step, agent obtains an observation, takes an action, and obtains a reward
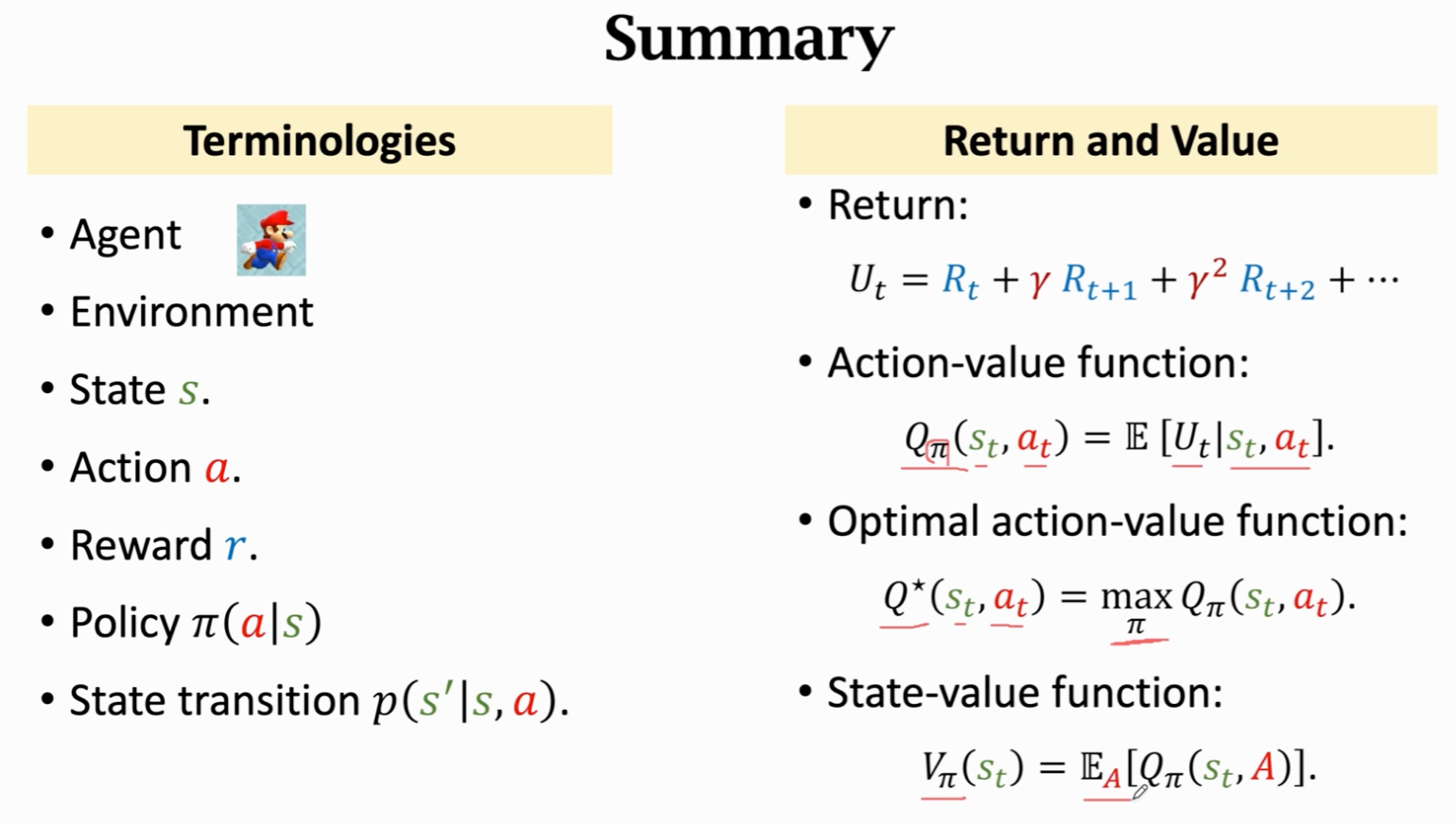
强化学习的框架主要由以下几个核心组成:
- 状态(State):反映 environment 当前的情况。
- 动作(Action):智能体在特定状态下可以采取的操作。
- 奖励(Reward):一个数值反馈,用于量化智能体采取某一动作后环境的反应。
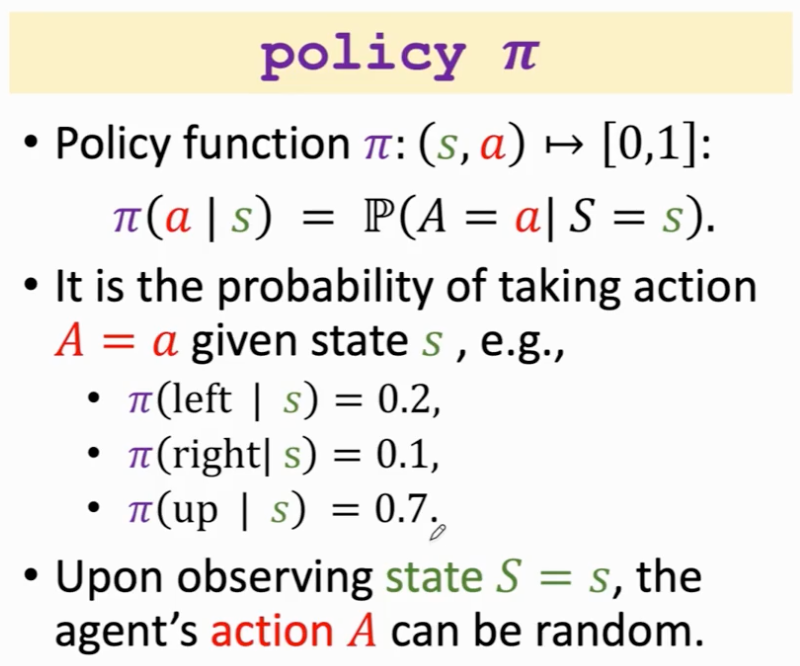
- 策略(Policy):一个映射函数,指导智能体在特定状态下应采取哪一动作。
这四个元素共同构成了马尔可夫决策过程(Markov Decision Process, MDP)最核心的数学模型。
注:MDPs 很好的一个性质:memoryless property 与历史无关
强化学习的目标是在给定的马尔可夫决策过程中找到最优策略。这个策略是从状态到动作的映射,旨在最大化累积回报,其数学表达式如下:
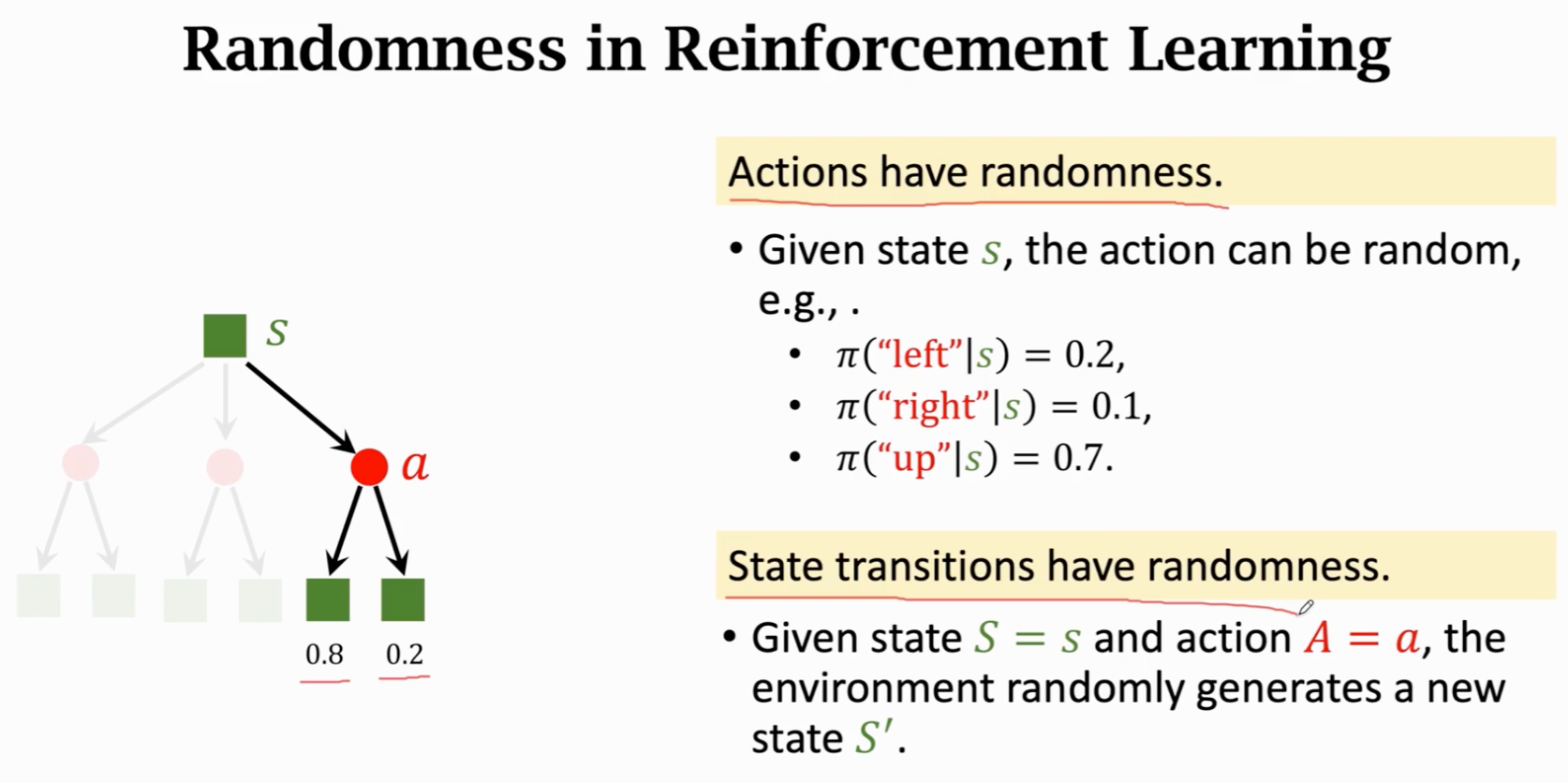
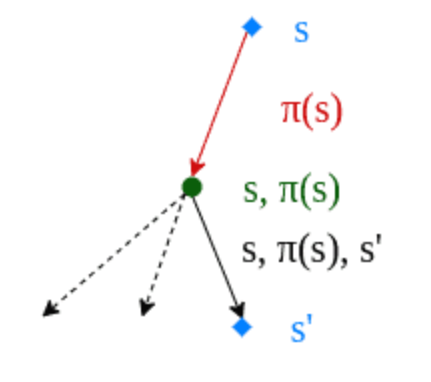
- 状态转移(State transition):agent 执行某个动作,由一个状态变成另一个状态
- 累计回报奖励(Return):
- 和 不是同等重要,这也是为什么会出现折扣因子
- 折扣回报(Discounted return):
强化学习中的随机性

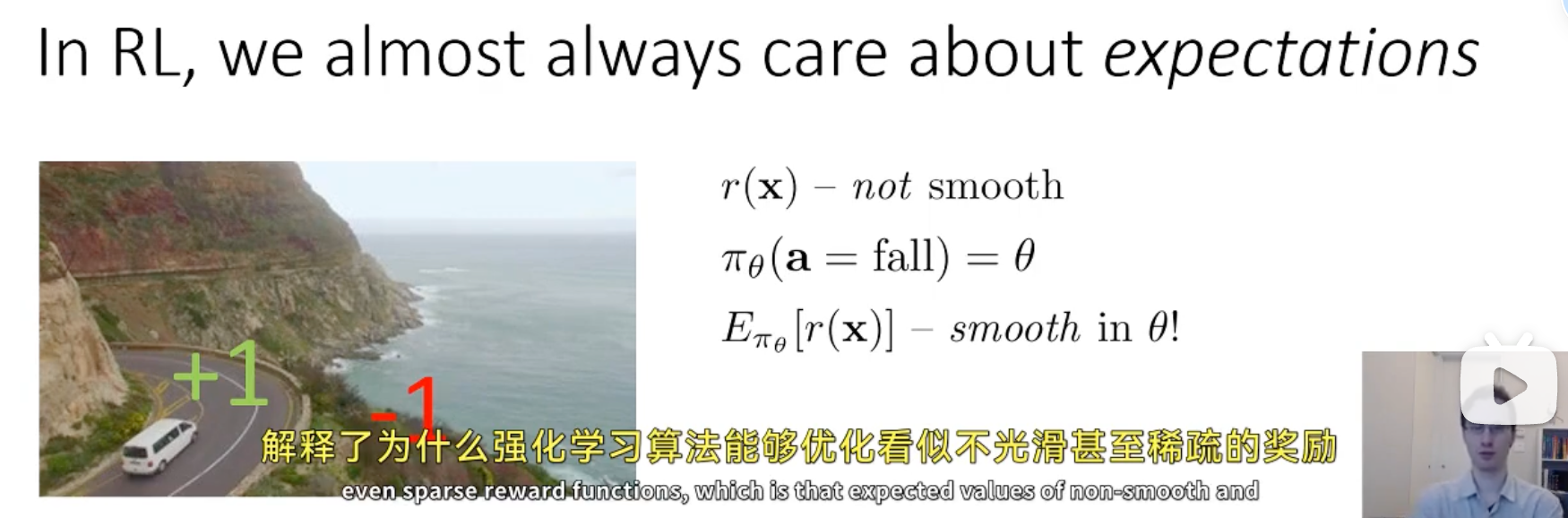
用期望把随机性积掉
强化学习目标
策略优化的目标是最大化期望回报
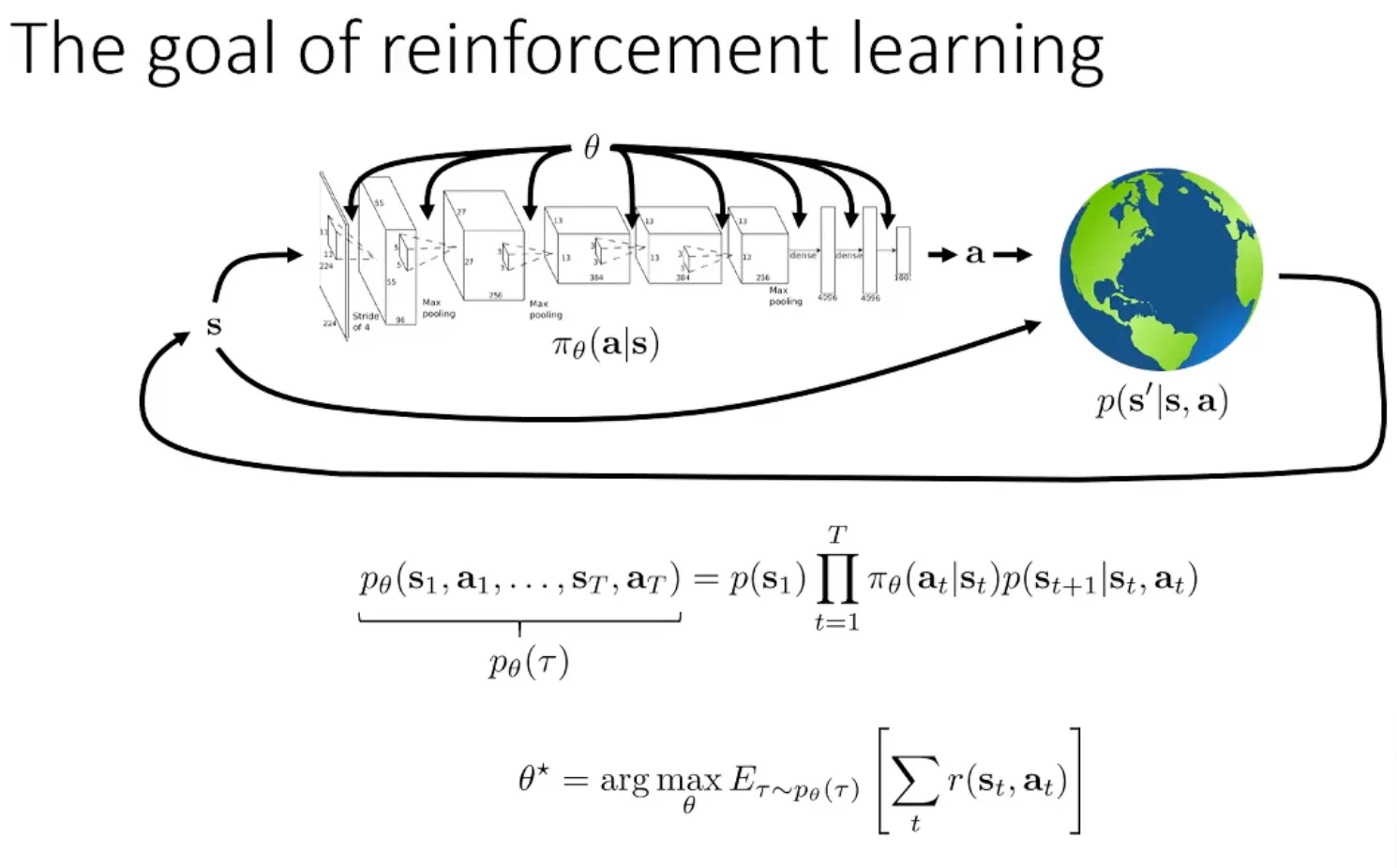
其中:
- :策略参数
- :轨迹
- :时间步长
中的 表示我们需要学习的策略中的参数
状态 1 转换到状态 2 = 状态转移算子 * 策略
目标:某条轨迹分布下的奖励总和
当时间趋于无穷时,奖励总和趋于无穷,无法优化。解决方法:除以 或者使用折扣因子
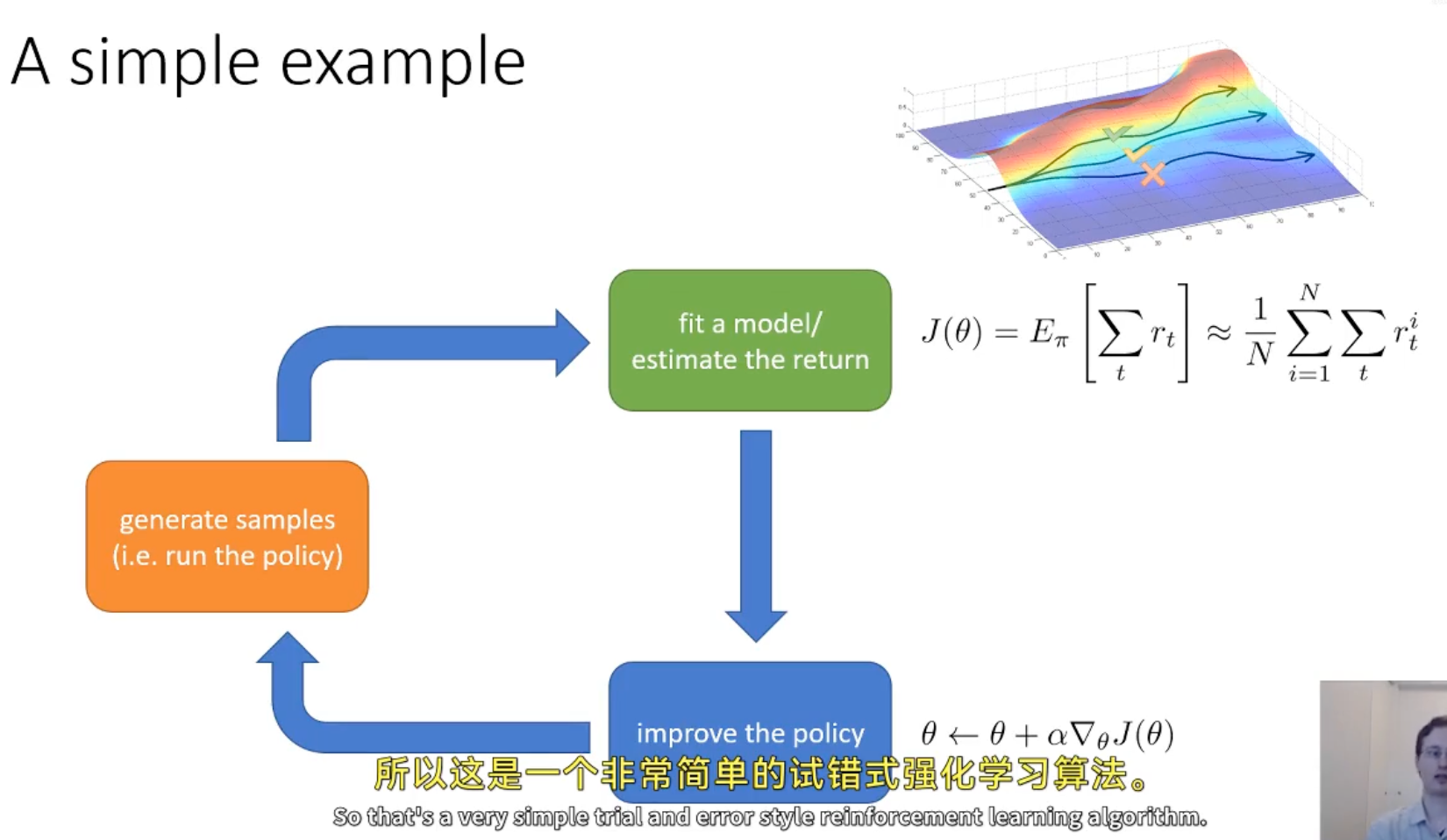
计算整个轨迹的奖励函数,然后使用梯度上升更新策略参数
通过神经网络来学习策略,然后使用反向传播来更新策略参数
期望
强化学习的目标:优化一个期望函数
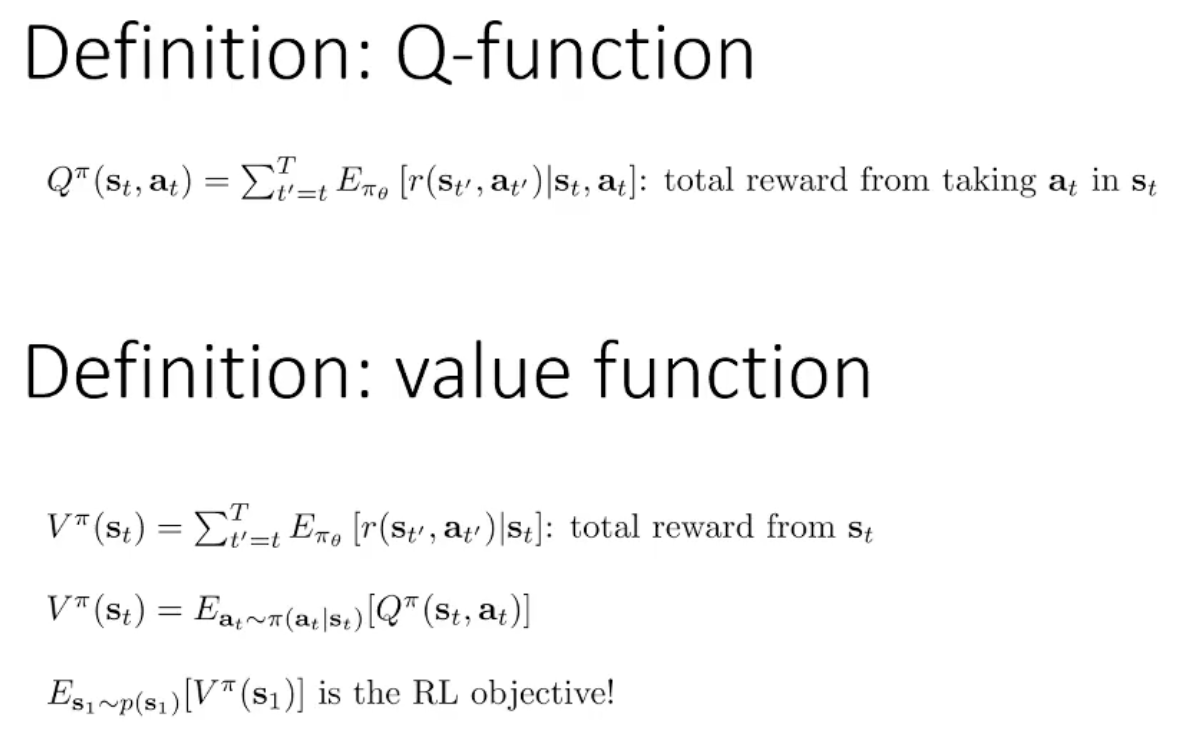
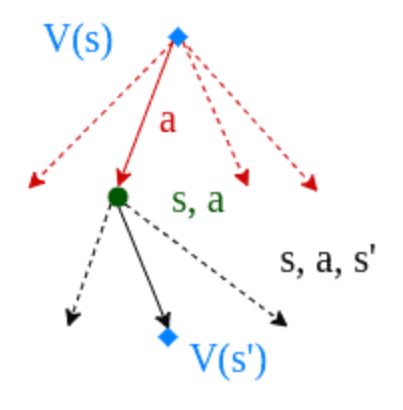
Q 函数:在给定状态 下采取特定动作 后,所能够获得的长期回报(或累积奖励)的期望值
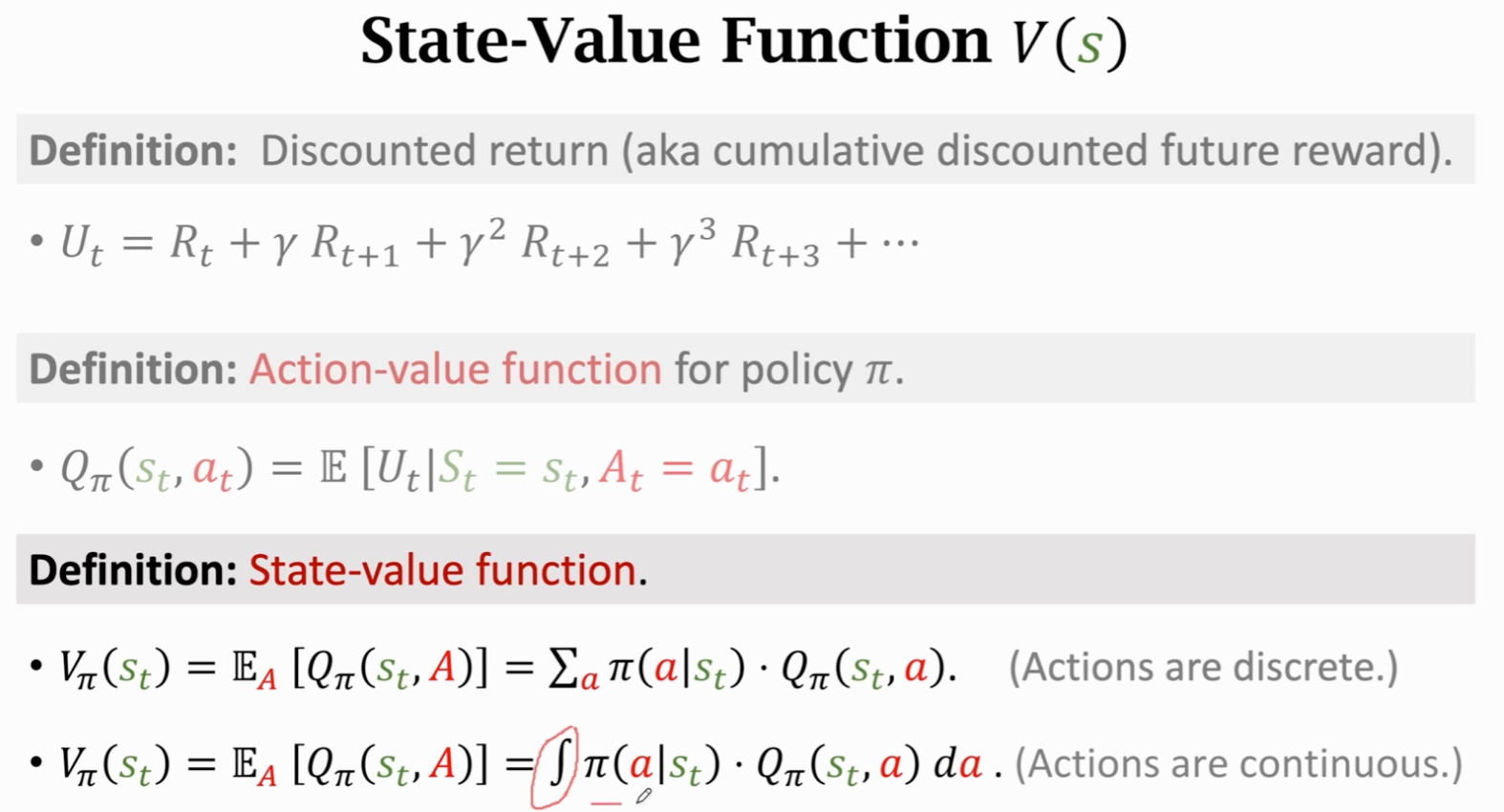
V 函数:在给定状态 下的总体价值,即按照策略执行后续动作所能获得的长期回报的期望值
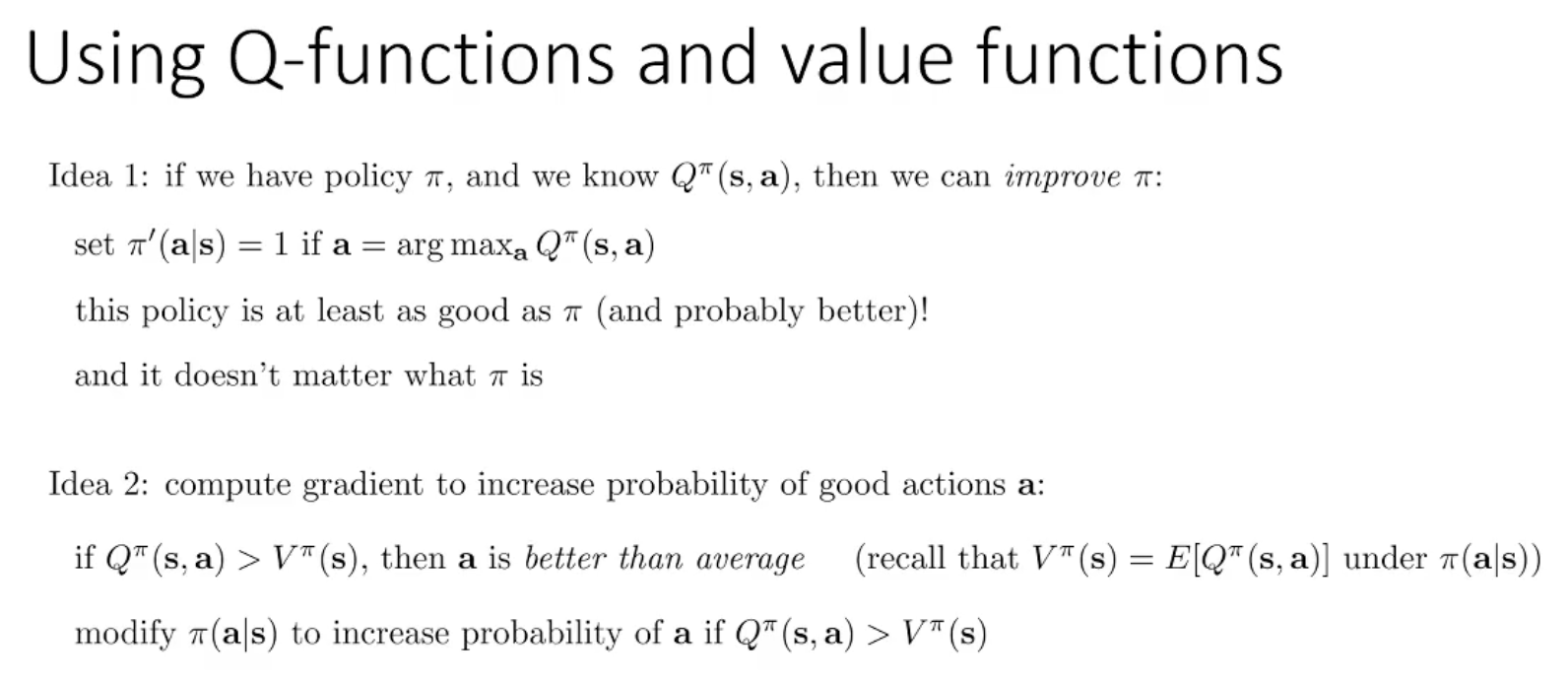
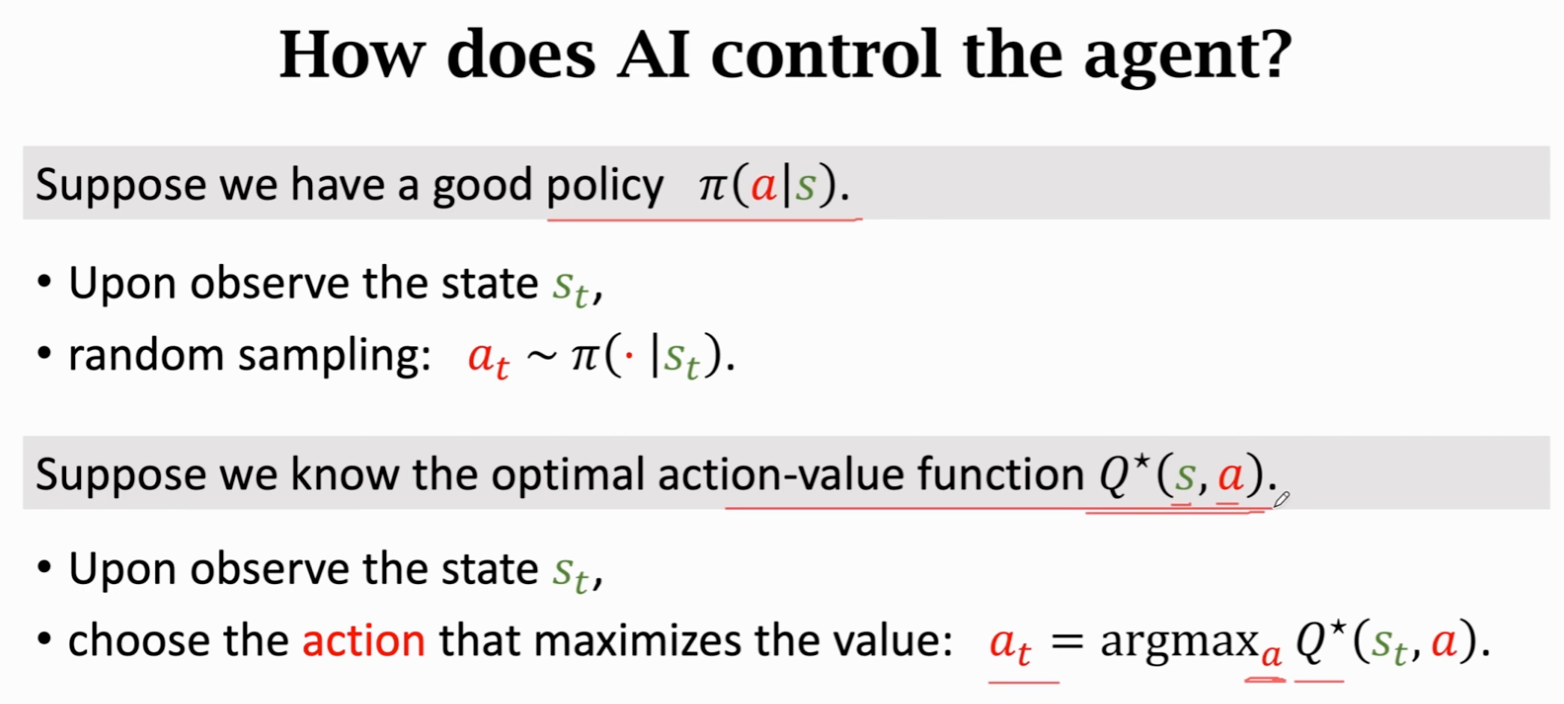
我们可以通过 Q 函数来改进策略:
- 直接选最优动作:如果我们知道策略 的 Q 函数 ,就可以在每个状态 下选择收益最高的动作 。假设 ,若 ,那么可以知道新策略的效果至少与原策略一样好,甚至更优。(为什么会更优?)
- 调整概率倾向于好动作:如果直接选最优动作不现实,可以通过增加收益高于平均值的动作的概率来改进策略。当 时,说明该动作比平均收益高,我们就提高其选择概率,从而让策略逐渐倾向于选择“好动作”。
greedy 方法:每次都选择最大 value 对应的 action,即
Q / V function
Q-function 叫做动作价值函数;V-function 叫做状态价值函数
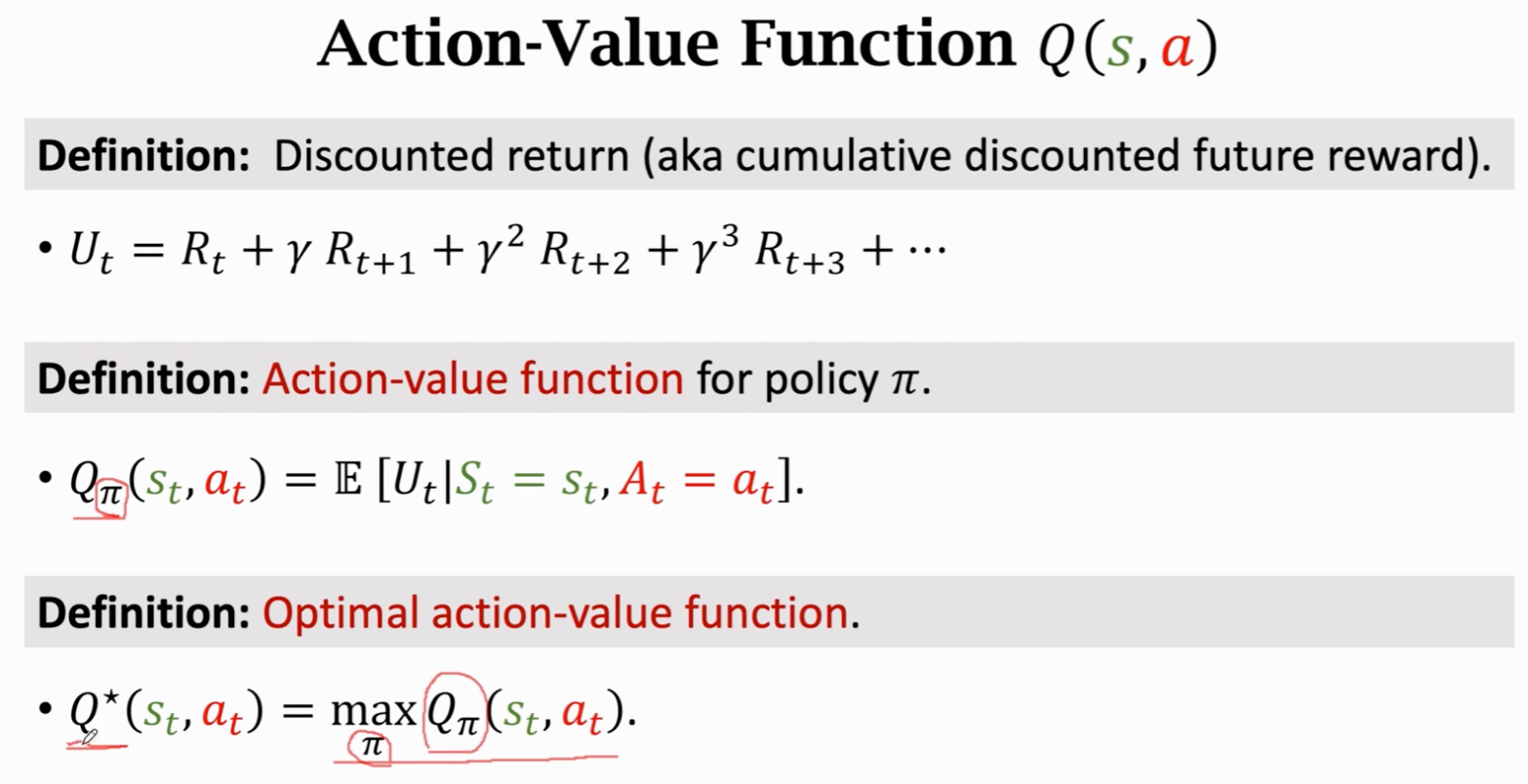
- 对于一个 policy , 用来评估 agent 在状态 采取动作 是否合适
- 对于一个固定的 policy , 用来评估状态 的好坏
- 用来评估策略 的好坏
如何控制 agent
学到 policy 或 两者之一即可
强化学习算法分类
- Policy gradients
- 直接优化策略函数,通过策略的梯度来更新策略参数
- REINFORCE, TRPO (Trust Region Policy Optimization), PPO (Proximal Policy Optimization)
- Value-based
- 通过学习状态 Q 函数或 V 函数来间接选择动作(隐式)
- 基于神经网络来估计 Q 函数
- Q-learning, DQN
- Actor-critic:结合 Policy Gradients 和 Value-Based 方法
- 神经网络来拟合模型去估计回报(Value-based),梯度上升去更新参数(Policy gradients)
- Actor:更新策略(Policy),生成动作;Critic:评估动作的质量(Value),给出反馈
- A3C (Asynchronous Advantage Actor-Critic), SAC (Soft Actor-Critic)
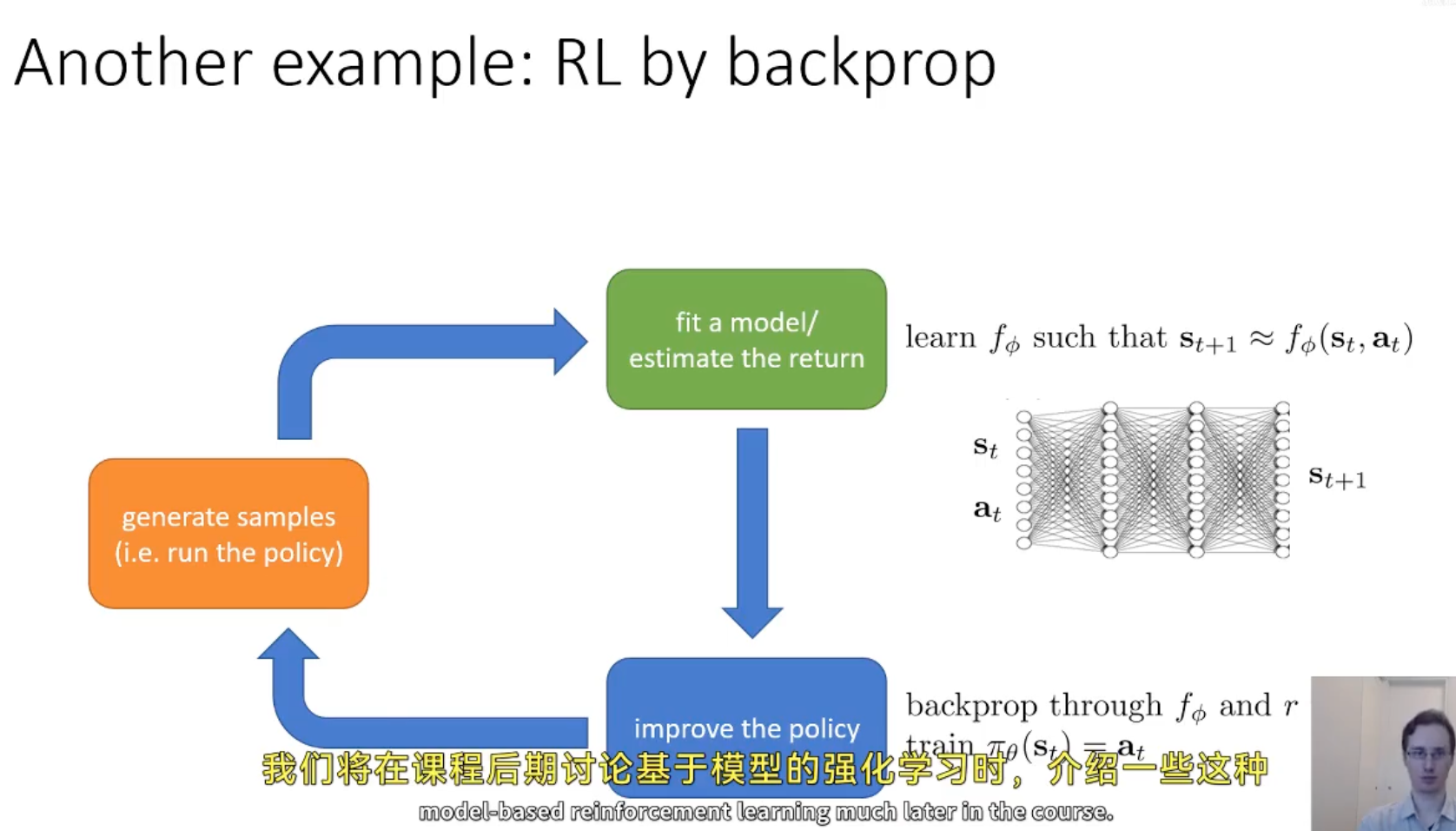
- Model-based RL:显式建模环境的动态转移模型,用于规划或模拟
- learn
算法评估维度
采样效率:需要多少样本来获得一个表现良好的策略
稳定性和易用性:是否震荡?能否收敛?
- Value-based:最好情况下,能够最小化拟合损失;最坏情况下,完全不能拟合
- Model-based:一定能收敛,但不保证收敛的模型就是最好的模型
- Policy gradient:唯一真正直接优化目标,效率最低
观测可用性:全观测还是部分观测
On-Policy v.s. Off-Policy
On-Policy 特点:
- 不使用历史数据,在采样效率上表现较差;
- 直接优化策略表现(即以采样效率换取可靠性);
- 之后提出的 On-Policy 算法都是在不断弥补采样效率的不足
Policy Gradient → TRPO → PPO
Off-Policy 特点:
- 典型算法:Q-Learning 和 DDPG → TD3 → SAC
- 通过对 Bellman 方程的优化,实现对历史数据的有效利用;
- 问题:满足 Bellman 方程并不能保证一定有很好的策略性能,不稳定(从经验上讲,满足 Bellman 方程能得到不错的性能、很好的效率)。TD3 和 SAC 是基于 DDPG 进行改进,在一定程度上有效缓解了这些问题
为什么 less efficient 算法还存在?采样效率快的算法在实际应用中可能会面临更高的计算成本
基于学习的策略
按照学习目标划分:基于策略(Policy-Based)和基于价值(Value-Based)
- Policy-Based方法直接输出下一步动作的概率分布,并根据此分布选择动作。然而,它不一定选择概率最高的动作,而是会从整体角度考虑。这种方法适用于连续和离散的动作空间。典型代表是Policy Gradients算法。
- Value-Based方法输出每个动作的价值估计,并选择价值最高的动作。这种方法主要适用于离散动作空间。常见算法包括Q-learning、Deep Q Network和Sarsa。
- 更高级的方法是结合上述两种approach:Actor-Critic。在这种方法中,Actor根据概率分布选择动作,Critic评估动作的价值,从而加速学习过程。代表算法有A2C、A3C和DDPG等。
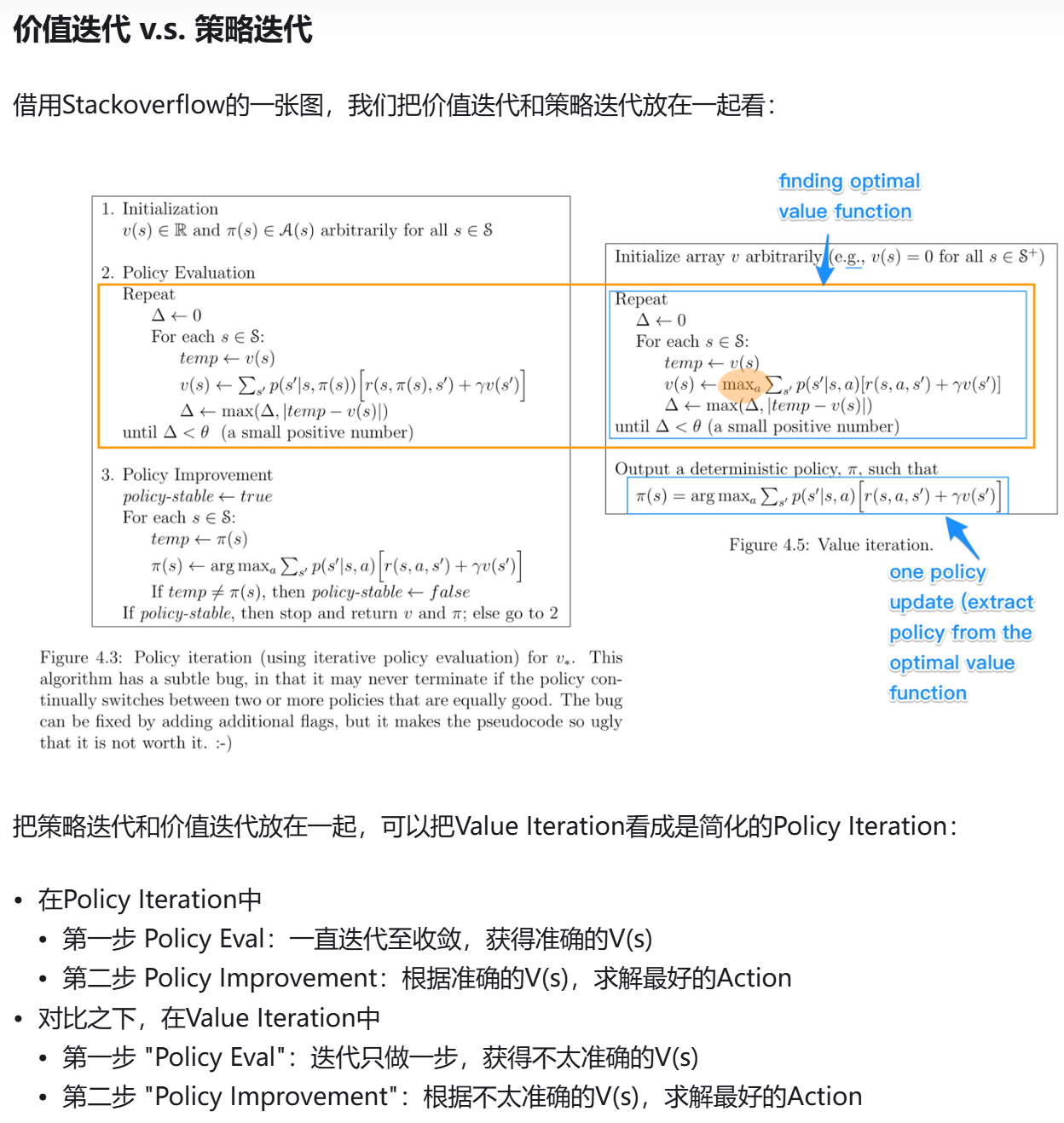
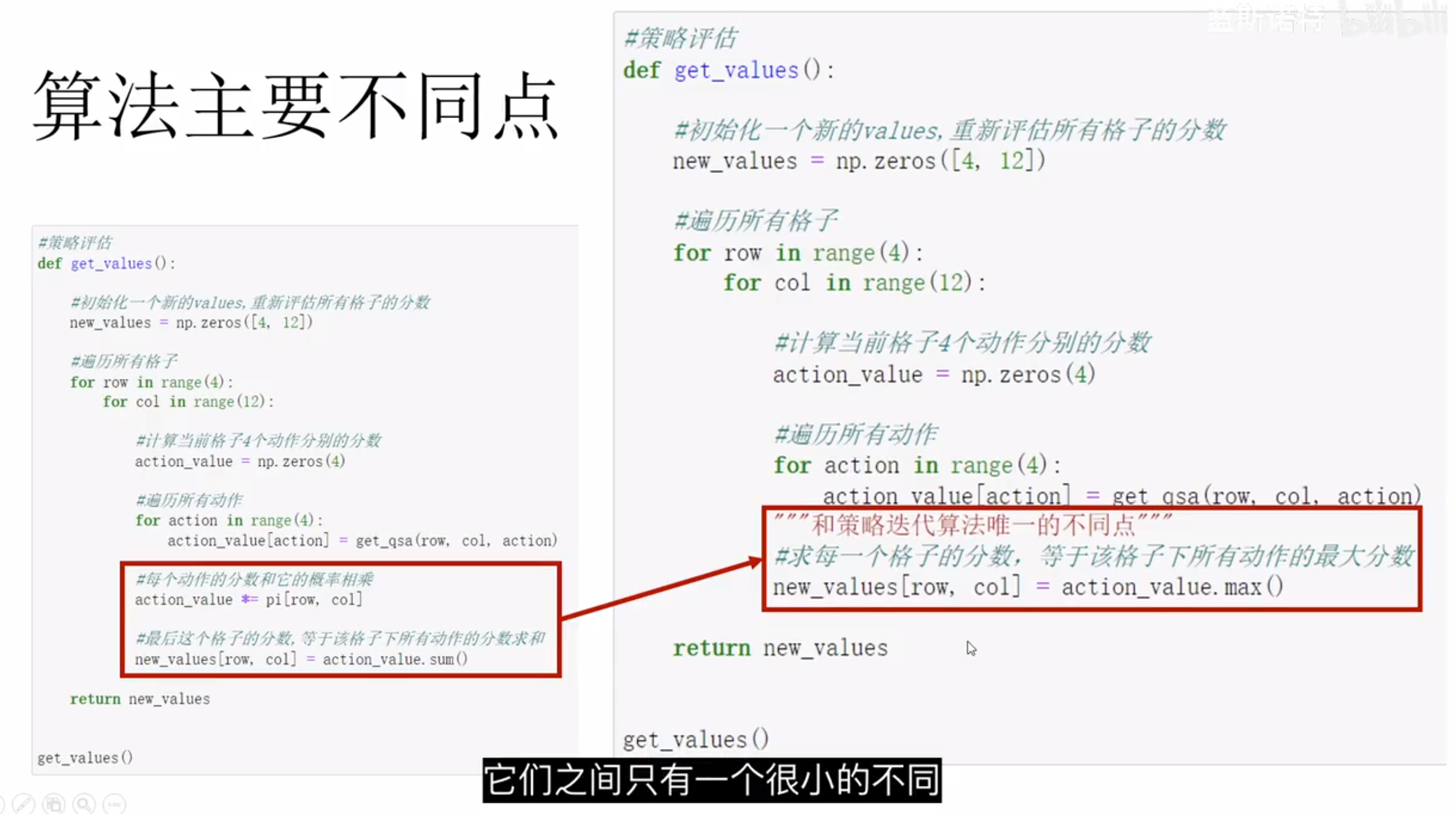
与策略迭代相比,价值迭代不考虑不同动作的概率,而是直接选择价值最高的动作
https://www.baeldung.com/cs/ml-value-iteration-vs-policy-iteration
Policy iteration
Value iteration